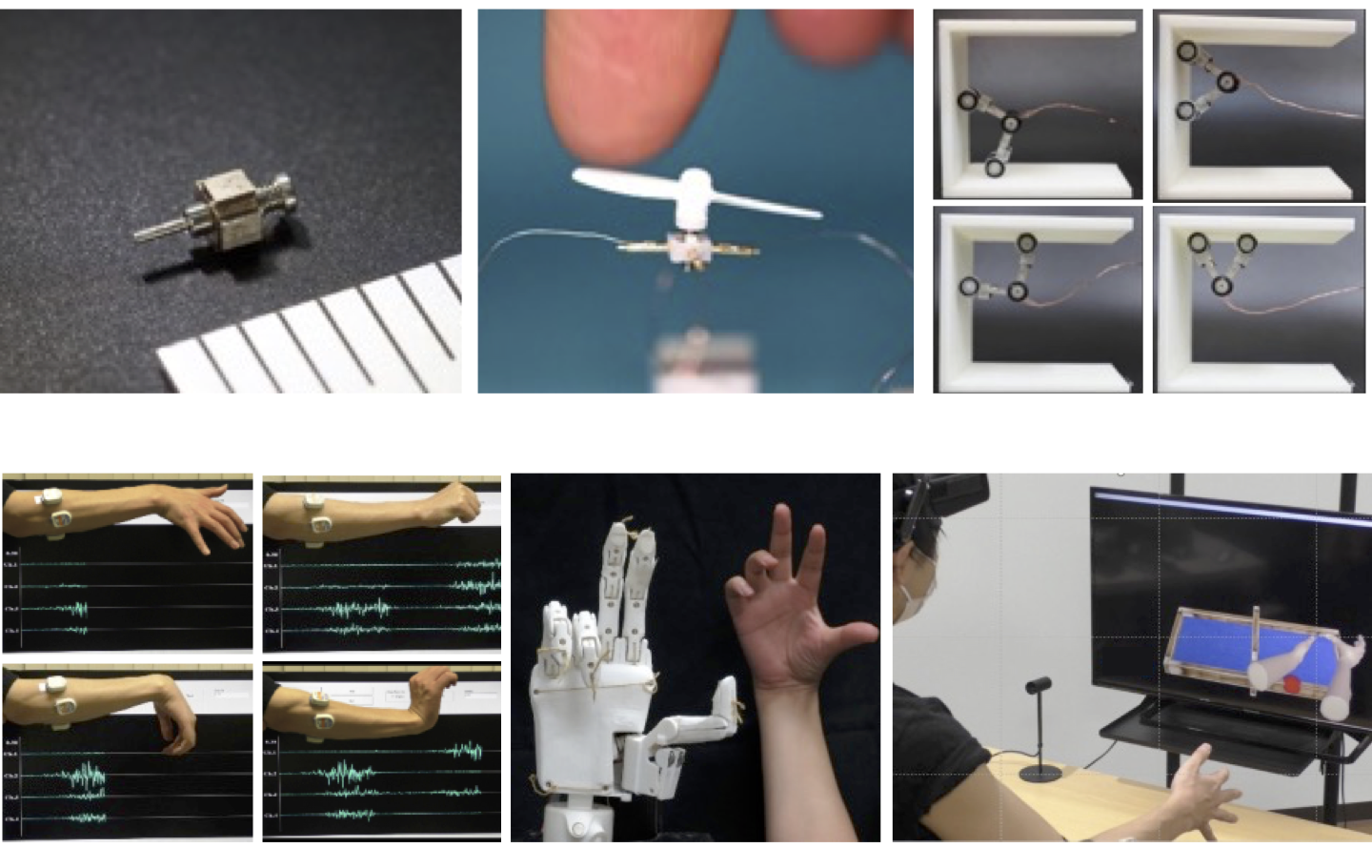
メカトロニクスシステム学研究室では,新しいセンサやアクチュエータの創造的かつ基礎的な研究開発,それらの技術を用いたロボットや医療機器などの応用的な研究開発,さらにはそれらの周辺技術の研究開発に取り組んでいます.特に,圧電効果を駆動原理とするセンサ・アクチュエータに着目し,駆動理論などの基礎的研究から,新デバイスの設計開発評価,さらにはそれらを応用したロボットの制御などの応用的研究までを研究の範囲としています.
(教授)真下 智昭 (准教授)芝軒 太郎 (助教)出原 俊介
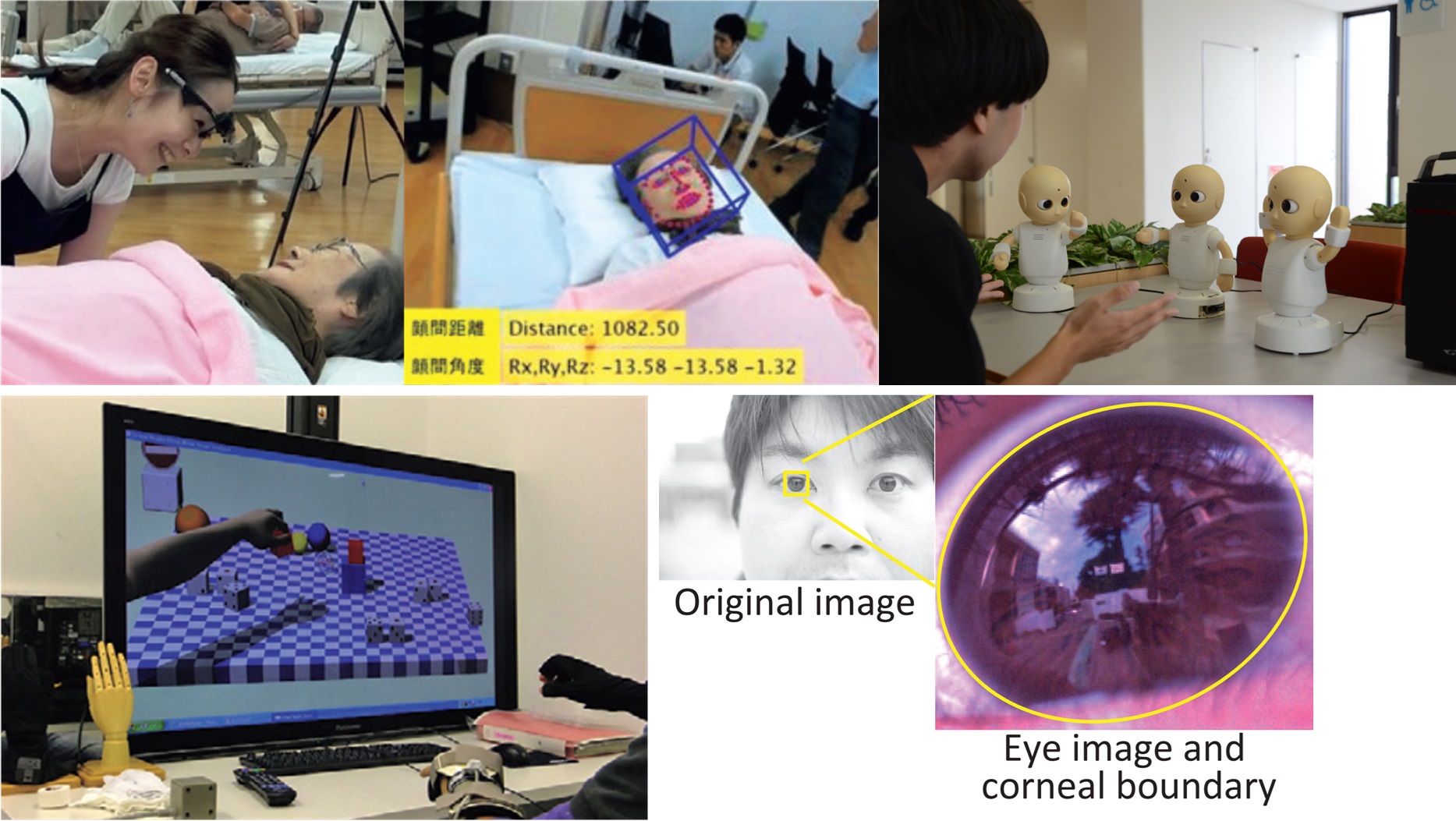
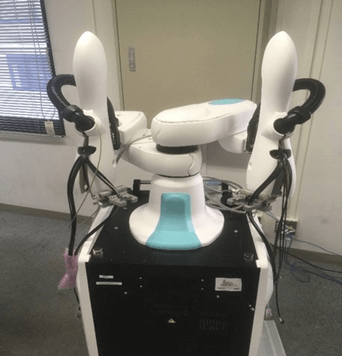
人間が機械装置やロボットを自由自在に操作するためには,人間の意図を計測して理解し,また装置の状態を人間に伝えるヒューマン・マシン・インタフェースが重要 です.本教育研究分野では,画像やセンサーからAIを使って人の意図を理解したり,様々なロボットを使いやすくするインタフェースを研究しています.また,医療の高 度化や効率化のための医療支援システムや,優しい介護を実現するVR/MR技術,人と事前な対話が可能なコミュニケーションロボットシステム,人の角膜表面反射から周囲の認識を行う画像システム,画像認識により人の健康状態や食事の残渣などを自動推定するAIシステムなどを開発しています.
(教授)中澤 篤志
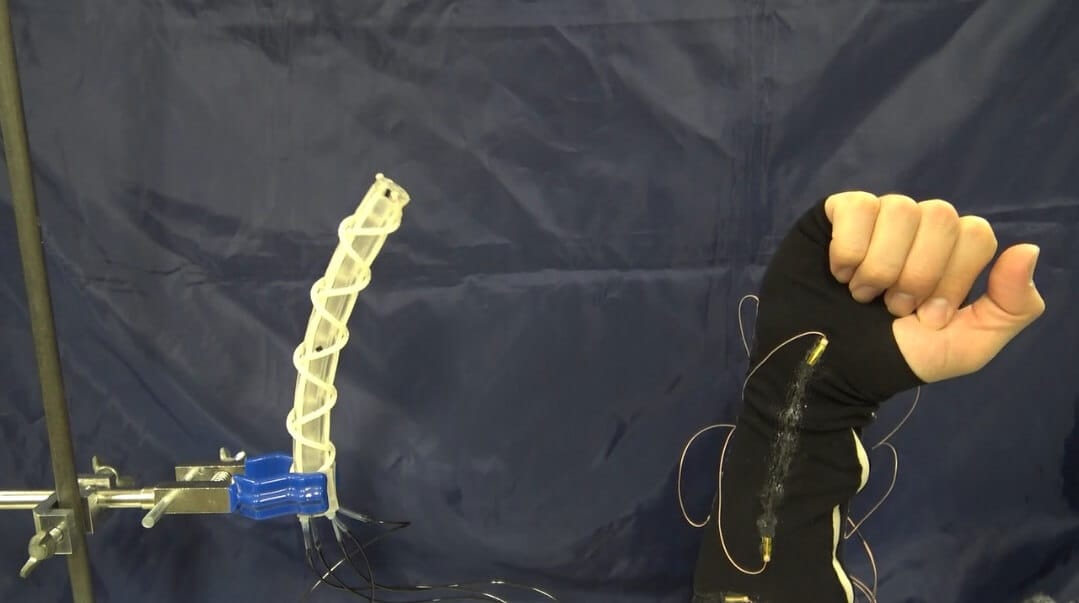
ものの動きを生み出すアクチュエータを中心に、ロボット、医療用機械などに使われる新しいセンサ・アクチュエータなどの機能デバイスと、これらを使用した機械システムに関する教育研究活動を行っています。機能性材料を利用することによって特殊な環境に対応したアクチュエータや、これまでにない柔らかい動きを生み出すソフトメカニズムに関する研究を進め、宇宙探査機に搭載される小型の機構や医療・生命科学機器用のやわらかい機械、極低温・高温や強磁場などの極限環境で使用される測定器などへ応用し、実用化を目指しています。
(教授)神田 岳文 (准教授)脇元 修一 (助教)山口 大介
システム制御は社会を支える基盤技術です。その対象分野は機械系にとどまらず、電気/情報/化学系など多岐に渡ります。私達は、インフラや産業機器,メカトロニクス機器で用いられている制御技術について研究を行っています。社会のニーズに応え、日常生活をより快適にする制御工学、制御技術の確立を目指します。
(教授)西村 悠樹 (助教)池崎 太一
(教授)西村 悠樹 (助教)池崎 太一
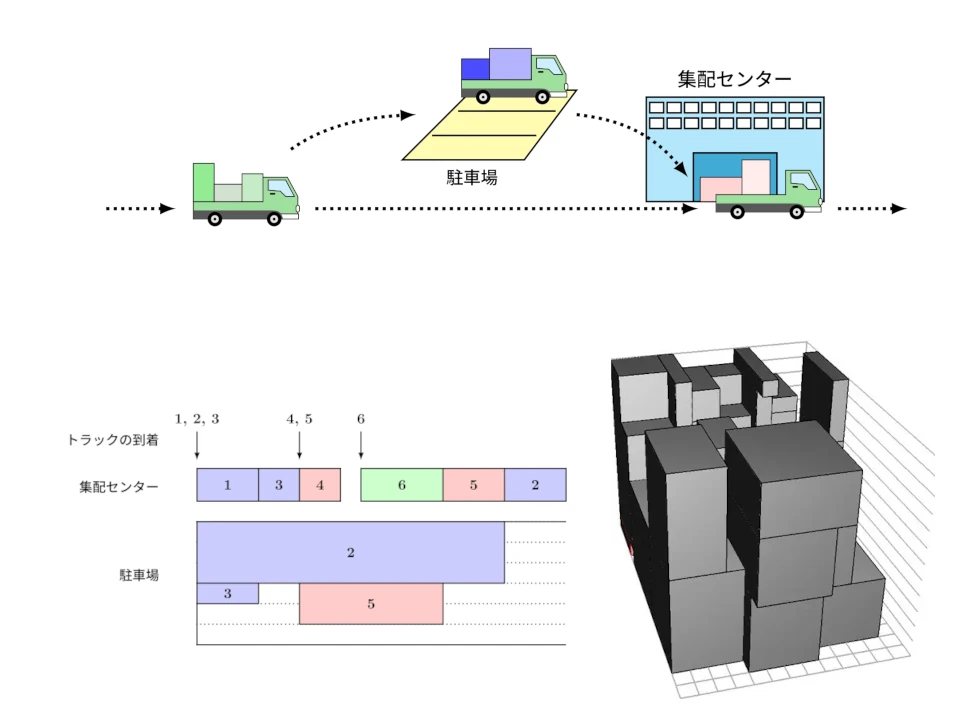
オペレーションズ・リサーチとは,現実的課題に対してよりよい意思決定を行うための数理的・科学的手法の総称で,数理最適化,確率統計,データサイエンスなど,様々な分野にまたがります.本研究室ではオペレーションズ・リサーチの中で,とくに数理システム最適化を扱っています.数理システム最適化は,対象とするシステムの振る舞いを数理的アプローチによって最適化する学問です.本研究では,数理システム最適化を,おもに生産物流システムにおける諸問題に適用する研究を行っています.
(教授)田中 俊二 (准教授)柳川 佳也 (助教)川本 卓樹
研究室HP
https://prodlab.sys.okayama-u.ac.jp/
(教授)田中 俊二 (准教授)柳川 佳也 (助教)川本 卓樹
研究室HP
https://prodlab.sys.okayama-u.ac.jp/
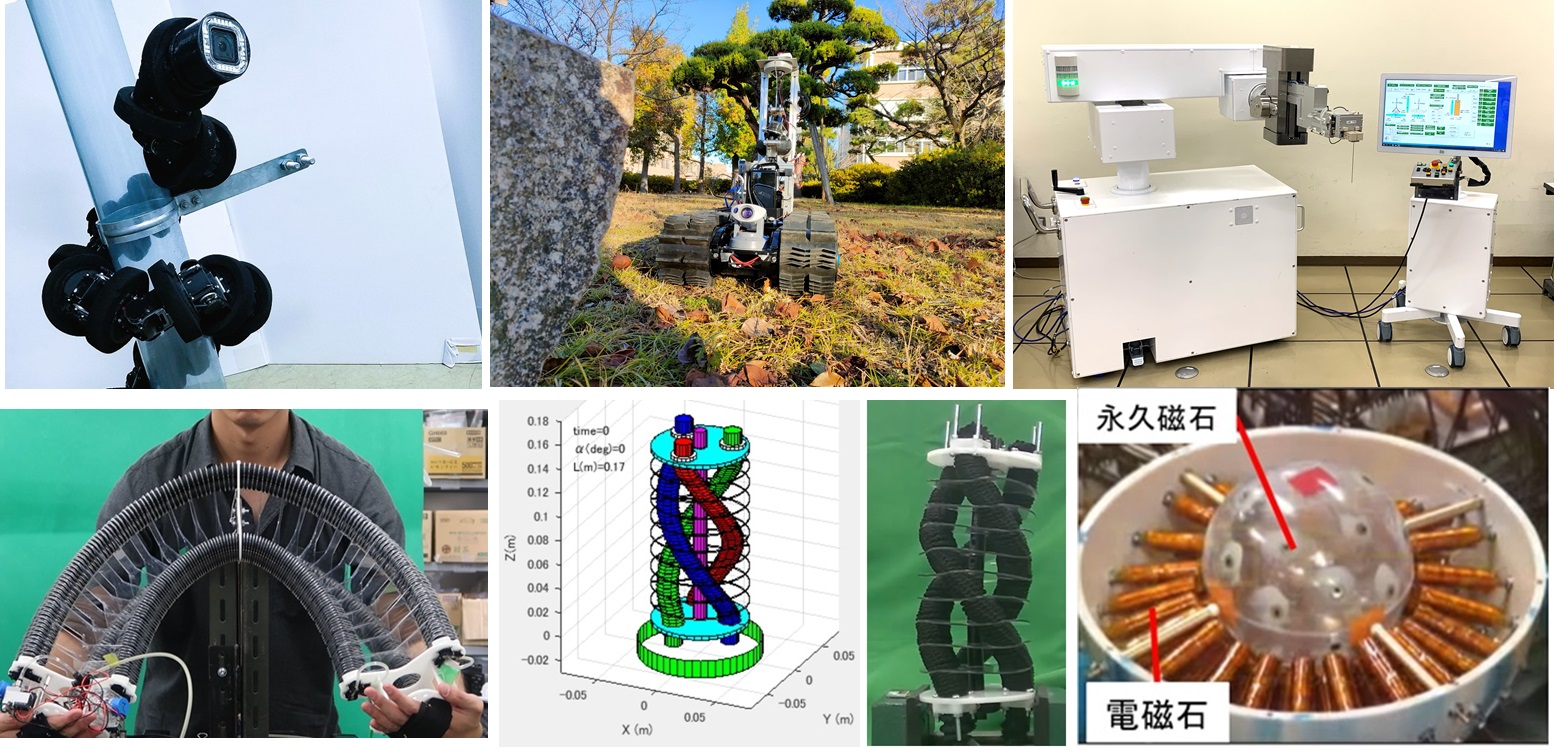
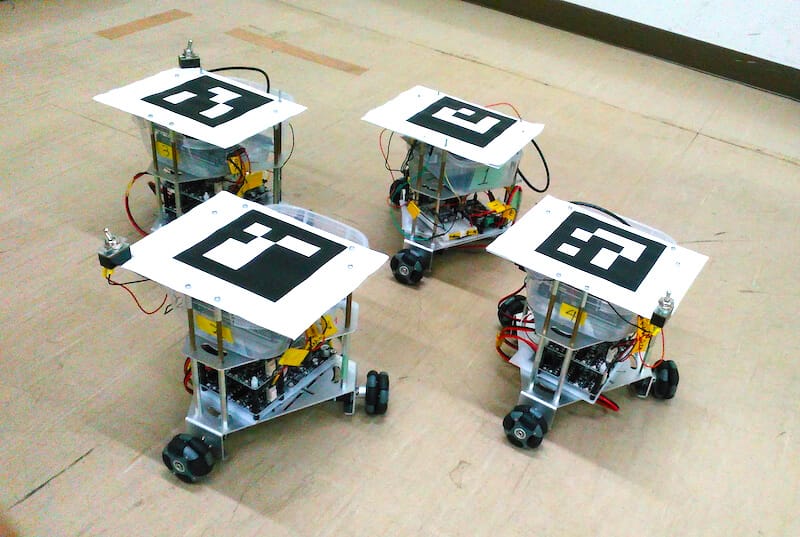
生物のように環境への高い適応力をもつロボットや,人と協働するロボット,あるいは人に適用するロボットの研究開発をしています.例えば,生物の蛇のように様々な環境を移動できるヘビ型ロボットや,災害対応レスキューロボットの研究開発を行っています.また,遠隔操作で針を刺す医療ロボットや,ソフトアクチュエータを活用したリハビリテーション装置を研究開発しています.
(教授)亀川 哲志 (助教)下岡 綜
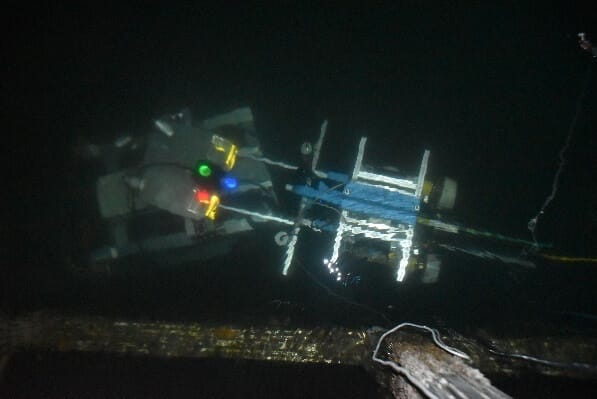
人間や動物が何かを追いかけるときには、対象となるものを見失わないようにするため、まず目が動き、つぎに追いかけようとして体が動きます。この一連の動作は生物の知能的行動に基づいたもので、これを応用すれば、様々な環境で適応的に行動するロボットも夢ではありません。私たちの研究室では、人間の知能的な振る舞いをロボットシステムに取り入れることを目指して、ビジュアルサーボを中心技術とし水中ロボットや医療用ロボットをはじめとした様々な知能ロボットに関する研究に取り組んでいます。(教授)松野 隆幸 (准教授)戸田 雄一郎
高度情報化社会を支える基盤技術として、サプライチェーンマネジメント、スケジューリング、システム最適化、ロボティクスなどの知的システム計画に関する基礎理論と、これらに基づく新しいモデリング、最適化、人工知能手法、および大規模システムの解析、診断、安全で最適な運用法を研究しています。また、環境問題として原子力関連施設や医療施設などから発生する放射性廃棄物の地中処分の安全性や福島第一原子力発電所事故により汚染された環境中での放射性物質の移動のほか、放射線遮蔽や被曝線量解析システムなどを研究しています。佐藤 治夫
研究室HP:TBD