メカトロニクスシステム学
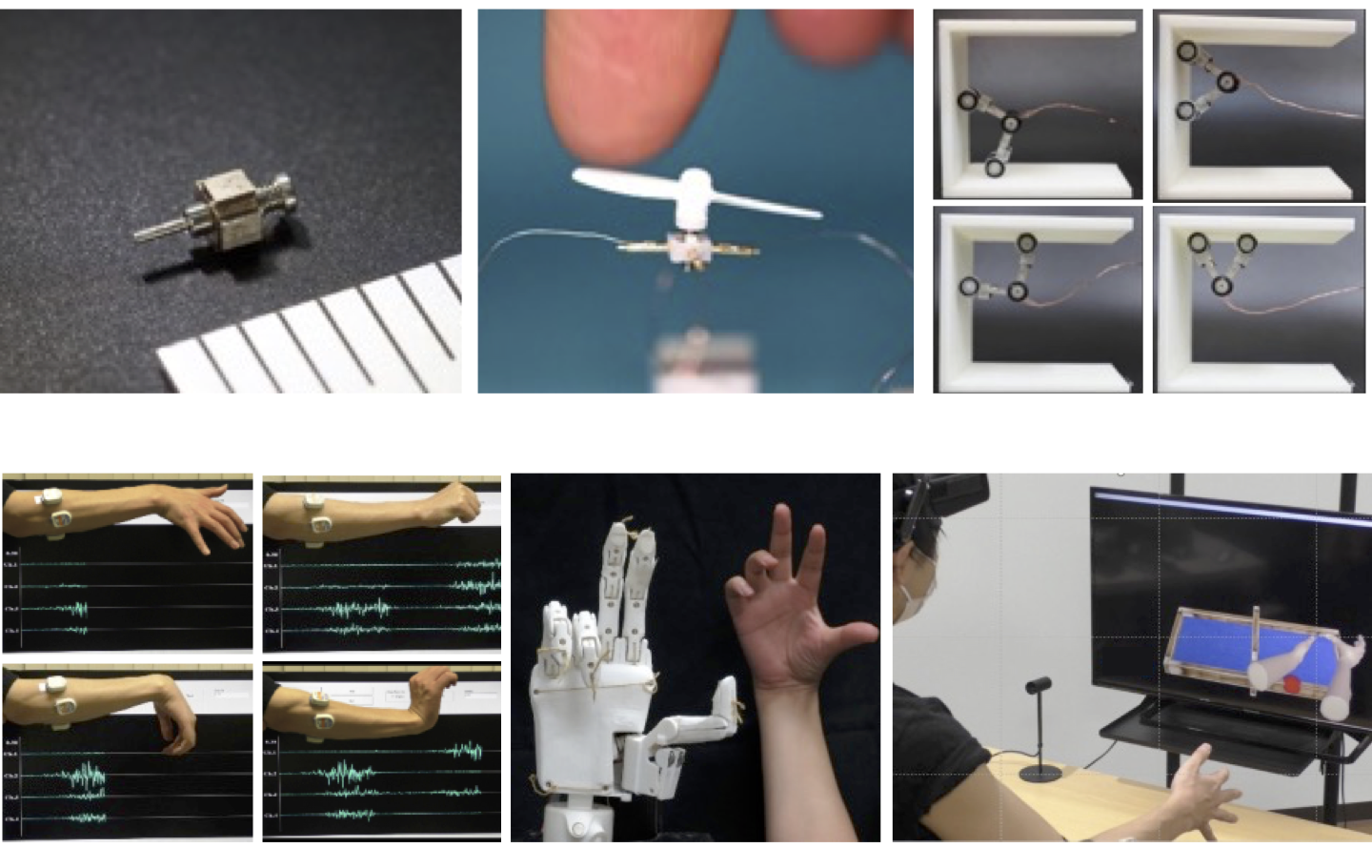
メカトロニクスシステム学研究室では,新しいセンサやアクチュエータの創造的かつ基礎的な研究開発,それらの技術を用いたロボットや医療機器などの応用的な研究開発,さらにはそれらの周辺技術の研究開発に取り組んでいます.特に,圧電効果を駆動原理とするセンサ・アクチュエータに着目し,駆動理論などの基礎的研究から,新デバイスの設計開発評価,さらにはそれらを応用したロボットの制御などの応用的研究までを研究の範囲としています.
(教授)真下 智昭 (准教授)芝軒 太郎 (助教)出原 俊介